如视宣布,面向学术研究及非商业用途正式开放10000套室内三维数据集 Realsee3D——这或是全球目前最大规模的空间三维数据集,旨在为空间智能领域的研究者、开发者提供高质量数据基础,加速整个行业的技术迭代与应用落地。

Realsee3D
此前,如视发布空间深度推测大模型 Argus1.0。作为首个支持全景图输入的空间深度推测大模型,Argus1.0依托如视所积累的千万级三维空间数据库训练而成。而此次开放的 Realsee3D三维数据集,正是从这一海量数据库中精选出的高质量样本。
数据集优势
Realsee3D 是一个大规模多视角RGB-D数据集,旨在推动室内三维感知、重建与场景理解领域的研究。该数据集具有以下优势特征:
No.1超大规模
- 10,000个独特的室内三维场景
- 95,962个细分房间单元
- 299,073组视点/RGB-D 图像对
No.2完备标注
为了赋能多任务学习(Multi-task Learning),我们提供了详尽的 ground truth 标注,不仅限于视觉,更延伸至几何与语义:
- 几何层:提供高精度 CAD 图纸与平面图。
- 语义层:包含 2D语义分割与3D检测标签。
No.3场景多样
为了确保模型在复杂现实环境中的鲁棒性,我们采用了“真实数据+程序化生成”的双引擎策略:
- 采集数据:1,000 个真实场景(捕捉现实物理世界的复杂光照、布局与生活痕迹)
- 合成数据:9,000 个合成场景(基于 100+专业设计师 精心搭配的风格模板,涵盖海量家具模型与装修风格)
数据类型
彩色全景图
深度图
位姿
CAD图纸
户型平面图
语义分割标签
3D物体检测标签

彩色全景图
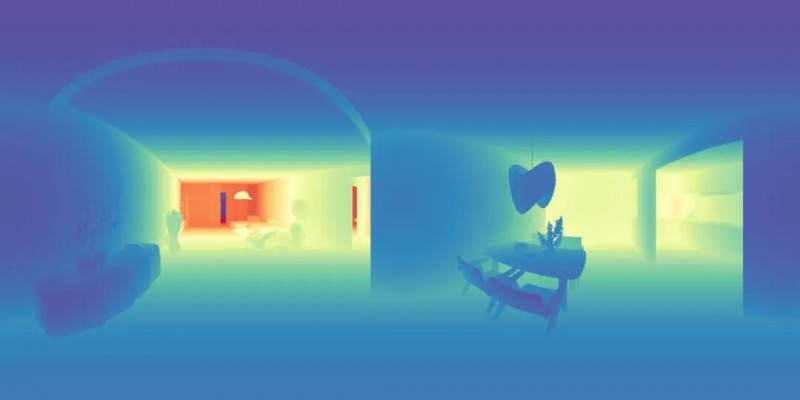
深度图

表面法线

语义分割图
适用方向
一直以来,空间智能领域的研究与应用面临着一个卡脖子难题:高质量的空间数据始终存在巨大缺口。如视凭借在三维空间数据领域的技术积累与资源沉淀,正填补了这一缺口。
本数据集适用于几何重建、多模态学习、具身智能等空间智能核心研究方向。欢迎全球研究者、开发者下载使用 Realsee3D三维数据集,共同探索空间智能研究的未来边界。
获取方式
目前,Realsee3D 数据集已通过官方渠道开放申请,访问如视 GitHub 仓库即可获取。







